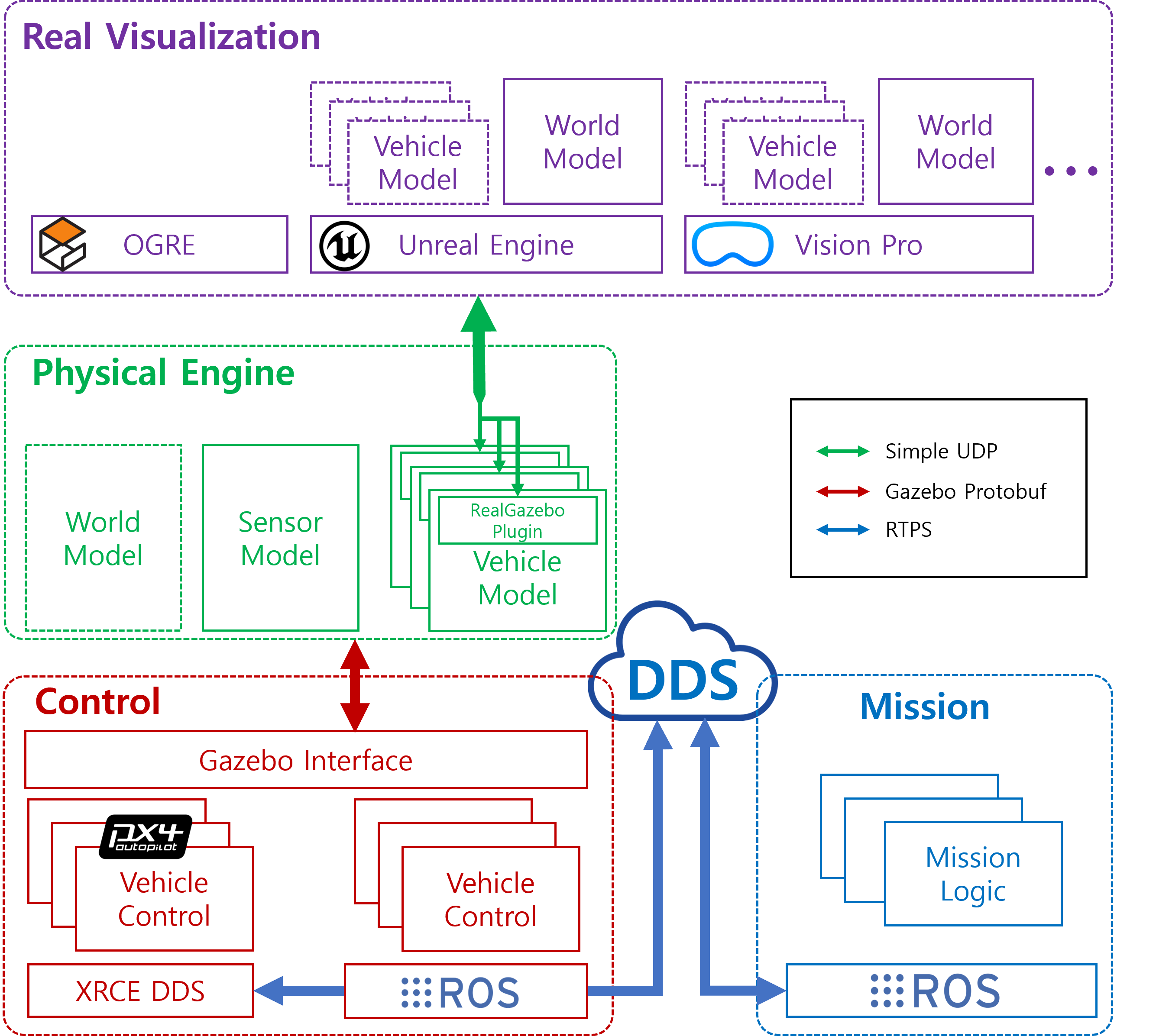
Modular Framework
RealGazebo is a flexible simulation framework in which rendering, physics, control, and mission logic are modularized and operated independently. Unlike conventional approaches where all functions are integrated into a single system, each module in RealGazebo can be deployed on separate systems. This modular design enhances scalability, enabling the operation of multiple unmanned vehicles as well as the integration of new technologies.